The current research on radar data processing, especially the trajectory processing part, mostly deals with air targets and maritime targets. Such targets are not very maneuverable, have simple backgrounds, and are easy to predict trajectories. Ground targets have strong maneuverability, complex conditions, a wide range of targets, and target occlusion within the same range. There are many environmental interference factors, which put high requirements on target detection, merger, cohesion, and aviation construction. It is necessary to develop and improve the trajectory processing methods that have been used in aviation and nautical fields in the past, and develop improved algorithms suitable for strong maneuvering targets.
With the development of information technology, the research of radar data processing has the following development directions: automatic tracking of weak and small targets, inter-frame filtering, pre-detection tracking and advanced algorithms can be used to improve automatic tracking performance; high-speed computing and parallel processing; Integration of sensor information fusion and control; integration of search, tracking, guidance, identification and command.
1 System design of data processing
Radar data processing uses a computer as a carrier and is implemented by writing data processing software. The computer can flexibly complete various types of data processing work; the software of data processing can also make the entire radar system more compatible and extensible. , The function is more perfect, the interface is more friendly.
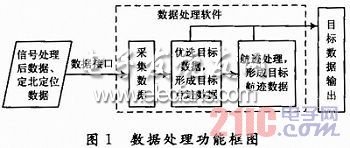
The functions completed by the data processing software mainly include: collecting data (signal processing target data, Dingbei data, positioning data), format conversion of the signal processed target data, point trace aggregation and other preferred target data to form more accurate and precise The target point track data; the track process is performed on the point track data to form the target track; the processed target point track and track data are output. The data processing function is shown in Figure 1.
Based on the research and reference to the existing radar data processing algorithm, the simulated target data and the actual target data recorded in other radar experiments of the same type were simulated. Based on the processing results, the existing algorithm was modified and improved to apply this Radar technical characteristics and requirements of indicators.
2 Algorithm design of dot trace formation
Because the radar beam has a certain width when the radar beam is continuously scanned, at least several pulses are continuously scanned to the target, each pulse corresponds to an azimuth value, the same target is captured multiple times, and the azimuth value when the target is captured multiple times All are different, which results in a greater degree of azimuth split. Therefore, it is necessary to condense multiple points of the same target in one scan into one point. First agglomerate on the distance to get the distance value in different azimuths in the horizontal lobe; then condense on the azimuth to obtain a unique azimuth estimate value; then linearly interpolate the distance value to obtain a unique estimator value.
(1) For the cohesion process of the same target in the distance, the centroids of a quantization unit that are continuous or spaced in the distance need to be determined according to equation (1), and the centroid is used as the estimated distance of the target point:
In the formula: n is the number of target traces; Ri and Vi are the distance and echo amplitude value of the i-th target trace, respectively.
(2) Condensation processing of the same target in azimuth, it is necessary to obtain the centroid of the adjacent traces in azimuth according to formula (2), and use the centroid as the estimated value of the azimuth of the target trace, this value is the only target trace estimated value.
In the formula: n is the number of target traces; Ai, Vi are the azimuth and echo amplitude value of the i-th target trace, respectively.
(3) Use equation (1) to calculate the distance value of the target in each azimuth. It is not the only estimate of the distance of the target point. It is necessary to find the unique estimate of the distance according to the position where the target azimuth falls. Assuming that the bearing estimate is between the i and i + 1 points of the distance estimate, the interpolation formula for the unique estimate of distance is:
In the formula: Ro 'is the only estimate of the distance of the target trace; Ao is the only estimate of the orientation of the target trace; Ri + 1, Ri, Ai + 1, Ai are the distances of the i + 1 and i traces, respectively Bearing value. At this point, a unique estimate of distance and bearing is obtained.
Fiber Optic Distribution Box,Fiber Optic Breakout Box,Fibre Optic Breakout Box,Fibre Break Out Box
Cixi Dani Plastic Products Co.,Ltd , https://www.cxdnplastic.com