Reading
Environmental models (different from environmental understanding), together with path search, constitute path planning. Generally, there are three types of environmental models, namely grid method, viewable method, and free space method. Path search algorithm is more, such as: Dijkstra, Floyd-Warshall, A+ algorithm, hierarchical method, action behavior method, potential field method, grid method, fuzzy logic method, topology method, penalty function method, genetic algorithm, simulated annealing Law, ant colony method, and neural network method.
The technical route of the driverless car has been determined. That is the technical route of the wheeled robot. Wheeled robot technology is fully applicable to driverless cars. This has been verified from the 2007 DARPA competition to the recent unmanned test vehicles such as Google, Ford, and Baidu. The current research on the basic algorithms of all driverless cars is derived from robotics.
Driverless cars need to solve three problems: the environment perception and real-time positioning, calculation and analysis, and path planning, as well as control execution. Today we will discuss the issues of computational analysis and path planning.
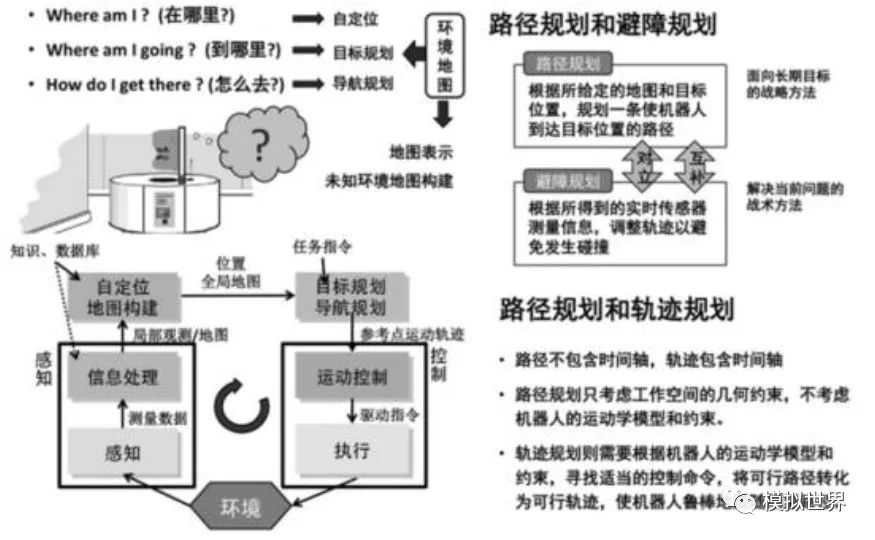
First of all, let us explain the following three concepts: path planning, obstacle avoidance planning, trajectory planning.
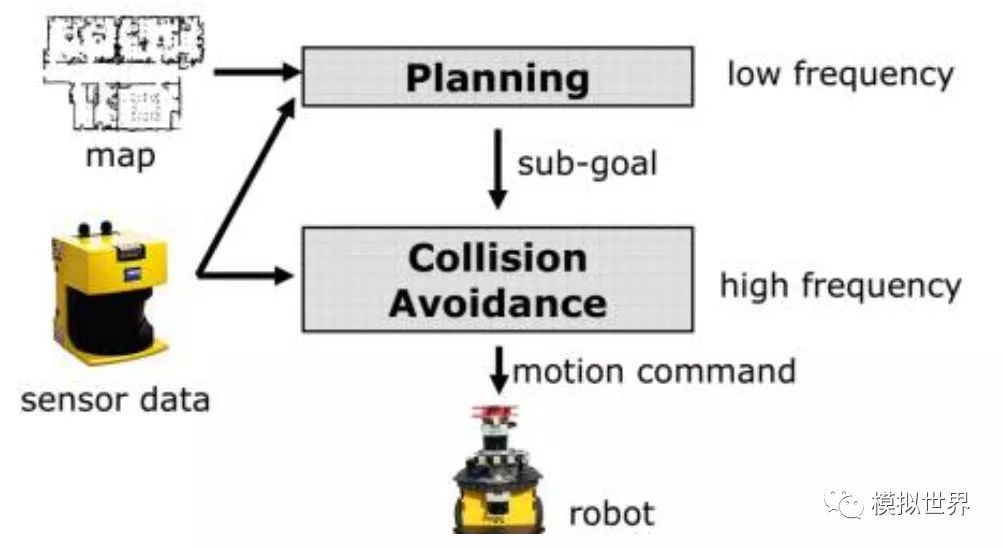
Path planning usually refers to global path planning, it can also be called global navigation planning, pure geometric path planning from starting point to target point, irrelevant time series, and irrelevant vehicle dynamics.
Obstacle avoidance planning is also called local path planning. It can also be called dynamic path planning. It can also be called immediate navigation planning. It is mainly to detect obstacles, and track moving objects (OBD) of obstacles (MODI T), to make a possible calculation of the next possible position, and eventually draw an existing collision risk and potential collision risk. Obstacle maps, this potential risk indicator is 100 milliseconds level, the future needs to be further improved, this is a great challenge to the efficiency of sensors, algorithms and processor computing power, obstacle avoidance planning not only consider space but also consider time series, The calculations in the complex urban area are staggering and may exceed 30 TFLOPS. This is the highest difficulty for unmanned vehicles. In the future, V2X maps will be added. The obstacle avoidance planning will be more complicated. Adding V2X maps will basically ensure that the unmanned vehicles will not have any form of active collision.
Trajectory planning is based on robotics research. It usually refers to the path planning of the robotic arm. In the area of ​​unmanned vehicles, the definition of trajectory planning does not feel uniform. Some people confuse obstacle avoidance planning with trajectory planning. The trajectory planning should be based on the path planning and obstacle avoidance planning, taking into account the time series and vehicle dynamics on the planning of the vehicle trajectory, mainly the vehicle longitudinal acceleration and vehicle lateral angular velocity settings. Transfer the settings to the execution system, steering, throttle, and brakes. If there is active suspension, trajectory planning may also need to consider terrain factors.
The three major plans are the most complex part of the car, and the number of algorithms is daunting. This is also the main reason why technology giants such as Baidu, Google, and Apple have to cut into the field of unmanned vehicles. These tech giants are best at algorithmically Optimize integration. Of course, the traditional depots such as Ford and Toyota have the absolute advantage of vehicle dynamics. The strength in this field is no worse than that of the tech giants, especially Toyota. From the open source SLAM to KITTI, the software strength is not inferior to Google.
Global path planning is not complicated, provided that there is a topological map, which is very easy for map manufacturers. It is a bit troublesome for non-map manufacturers, but it can only be a small problem. Therefore, we focus on obstacle avoidance planning. The premise of obstacle avoidance planning is to have a deep understanding of the surrounding environment and have a very real-time understanding of the environment.
With the environment model (different from the environmental understanding), coupled with the path search constitutes the path planning. Generally, there are three types of environmental models, namely grid method, viewable method, and free space method. There are many algorithms for path search, Dijkstra, Floyd-Warshall, A+ algorithm, hierarchical method, action behavior method, potential field method, grid method, fuzzy logic method, topology method, penalty function method, genetic algorithm, simulated annealing method Ant colony method and neural network method. It should be pointed out that most of the algorithms were born in the sixties.
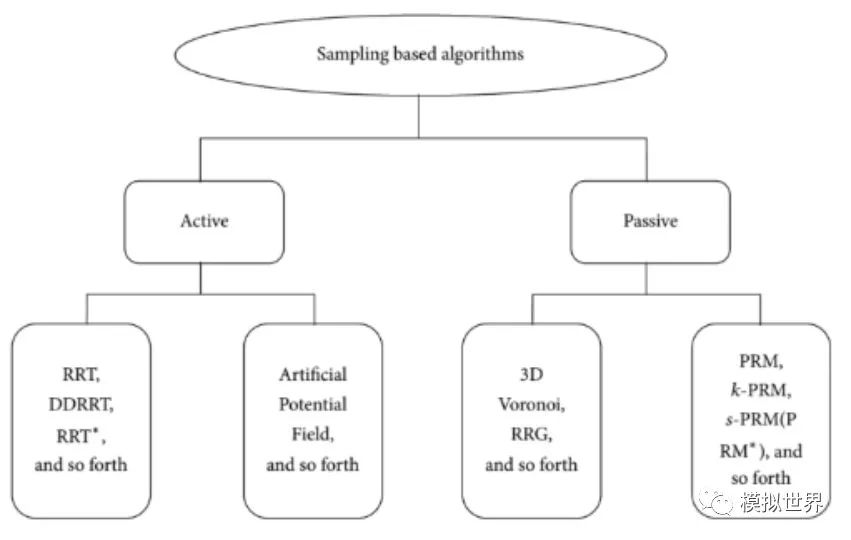
This is only a 2D level, and the 3D level will be more complicated. There are subdivided algorithms for each of the algorithms below, making people look dizzy. Because there are few literatures that say 3D path algorithms, let's say a few words. 3D path algorithms can be roughly divided into five categories: sampling, node, engineering, mathematics, and bionic algorithms. (Bioinspired), Hybrid Algorithm (MultiFusion). Taking a sampling algorithm as an example, the following can be divided into active and passive types. The active type can be further subdivided below.
1. Sampling type 3D path planning
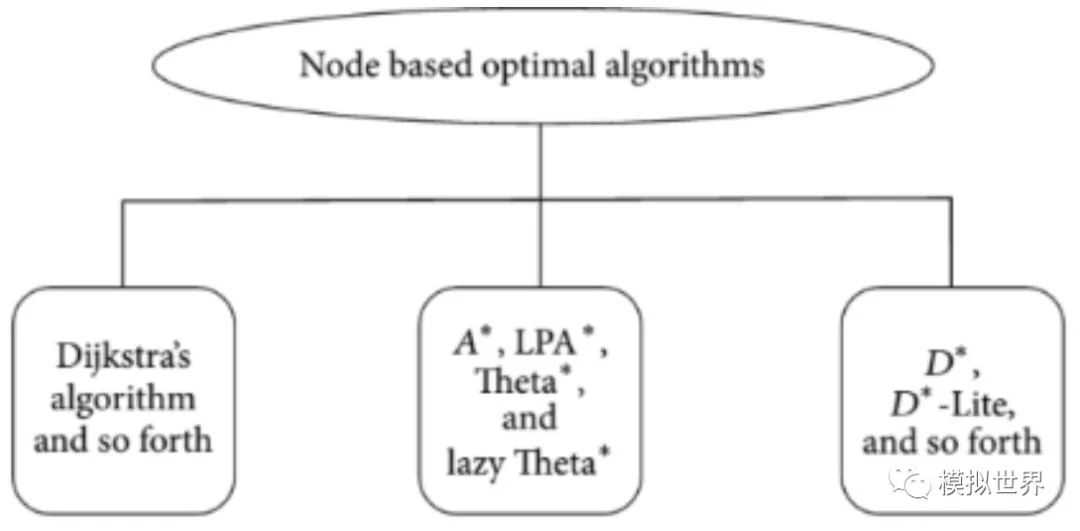
2. The node type algorithm is divided into three categories below
3. In terms of environmental modeling, the grid method is recognized as the most mature algorithm. The grid method should also be the algorithm with the highest safety factor and the algorithm that consumes the most computing resources. However, unmanned vehicles need to be considered safe, safety is the first, and cost is the second. At the same time, semiconductor giants such as Nvidia and Intel are constantly improving computing performance, and computing resources need not be considered too much.
4. The grid method divides the workspace into a regular and uniform grid of binary information. During the movement of the robot, the size and position of the grid remain unchanged. The binary information indicates whether there is an obstacle at the grid, and the grid without obstacles is called a free grid, otherwise it is an obstacle grid. The size of the grid is usually adapted to the basic movement step of the robot, so the robot movement is converted to move from one free grid to the next free grid. The path length of the robot corresponds to the number of grids climbed by the robot. The grid method is intuitive and modeling is relatively easy, so it has been widely used.
5. In the other two algorithms, the merits of the viable method, the free space method, and the grid method are more flexible and consume less computing resources. The disadvantages are obvious. The number of obstacles is proportional to the complexity of the algorithm. When the algorithm is too complex, the reliability is reduced. At the same time, it is not suitable for the dynamic environment, and the change of the movement speed is required to be as small as possible. The disadvantage of the grid method is that if the resolution is high, the computing resources and memory requirements are high. Obviously, the viable method and the free space method are suitable for robots, and the grid method is more suitable for unmanned vehicles. This is almost certainly a conclusion in the industry. This is partly related to the sensor. It is difficult for the vision system to adapt to the too-fine grid method because it is impossible for the vision system to do fine quantitative boundary segmentation. Lidar is very suitable for the grid method.
In terms of path search, the Dijkstra algorithm is typical.
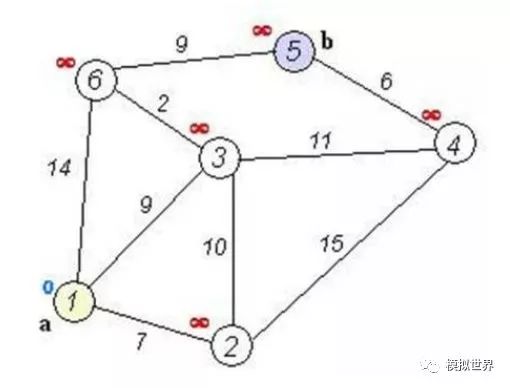
The Dijkstra algorithm is one of the classic algorithms for the shortest path algorithm, proposed by EW Dijkstra in 1959. The algorithm is suitable for calculating the shortest path problem with non-negative road weights. It can give the shortest path from one node to all other nodes in the graph. The idea is clear and the search is accurate. In contrast, because the input is a large sparse matrix, it also has the disadvantage of long time and large space.
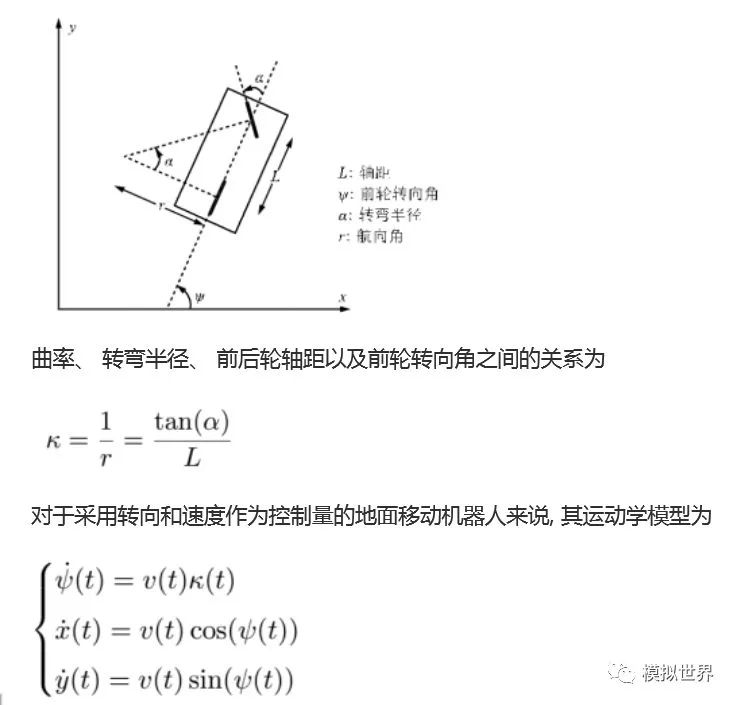
Trajectory planning is rarely studied because most technology companies are unable to flex their muscles in the area of ​​vehicle dynamics. Technology companies all spend their energy on how to generate trajectories, and there are relatively few studies on whether the generated trajectories satisfy the constraints of kinematic constraints, side-slip constraints, and actuator constraints, that is, the feasibility of trajectories. For non-integrity-constrained systems such as unmanned vehicles, researchers usually perform trajectory planning based on the body model. According to the accuracy of the car body model, the trajectory planning method can be further divided into model predictive control (MPC) and geometric trajectory-based planning methods. The trajectory planning method of unmanned vehicle based on model prediction was first proposed by Kelly A and Nagy B.
For the mobile robot, the trajectory generation problem mainly studies how to generate a series of actions so that the robot reaches the target state from the initial state. For an unmanned vehicle, its initial state includes its two-dimensional coordinates (x, y), heading angle ψ, and curvature κ.
The actual situation is far more complicated than this, and a large number of mathematical equations need to be established. Good planning must establish a deep understanding of the surrounding environment, especially the dynamic environment. This is the third part of the core technology of autopilot described below: MODAT.
Sensing, decision-making (path planning), and positioning are all based on sensors or software systems. This is the strength of technology-based manufacturers. However, remote-control execution systems are the absolute strengths of the traditional automotive industry (not necessarily the entire vehicle manufacturer). The main reason why technology manufacturers are doomed to be unable to build cars independently is that whether Google or Baidu, they must join forces with the traditional automobile industry in order to enter the field of unmanned vehicles. We have the opportunity to talk about the implementation of remote control.
The advantage of USB Cable Type C is that it supports higher current, that is that more current can be passed by Type-C in the same time. In this way, the charging speed of the device can be accelerated. At present, the charging current of most Type-C data lines is generally 2A. If the charging rate of 3A is to be reached, a high-current wall charging matching it is required. That is to say, if the wall charge only supports 1A, whether it is charged with 2A or 3A data line, there is no difference fundamentally. If the current supported by the wall charging is 2A, and the type-C data cable of 2A/3A is matched, the effect can be significantly changed.
In addition, the device equipped with the Type-C interface can be charged by connecting the mobile power supply through the Type-C cable or Usb C Cable. Users do not need to carry the charging cable, but can have the wall charging and Type-C cable. In addition, when selecting a Type-C charging cable, We should pay attention to the current limit. The charging data cable 1A does not have fast charging performance, 2A is the most commonly used Type-C charging data line, and 3A is the best data line at present. If you want to have fast charging effect, you must choose the Type-C charging data line with 3A current.
The highlights of Type-C interface are thinner design, faster transmission speed (USB3.1 up to 10Gbps) and stronger power transmission (up to 100W).The biggest feature of Type-C double-sided plugable interface is that it supports double-sided insertion of USBinterface. Officially solved the USB never insert the worldwide problem, the front and the back of the random plug.The USB Cable used with it must also be thinner and lighter.

Usb Cable Type C,Usb Type C Cable,Type C 3.0 Cable,Usb Type C Data Cable
Henan Yijiao Trading Co., Ltd , https://www.yjusbhubs.com